

 超级版主
超级版主主要是由飞行操纵、任务载荷控制、数据链路控制和通信指挥等组成
飞行控制:通过操纵控制面板上的按钮或使用鼠标和键盘,控制无人机的飞行高度、速度、方向和姿态等参数;
任务控制:设置和执行无人机的任务,如拍照、录像、测量、搜索和救援等;
数据传输:将无人机采集到的数据传输到地面站或其他接收设备;
状态监测:实时监测无人机的状态,如电池电量、传感器数据、飞行轨迹等;
导航控制:通过导航系统控制无人机的飞行路径和目标定位;
安全控制:设置无人机的安全限制和自动驾驶模式,以确保无人机的安全飞行。
①申请前需对无人机实名认证
②需清楚条例的常见问题,明白无人机怎么飞合法
③UOM线上申报流程:https://uav.worldhtyg.club/387.html
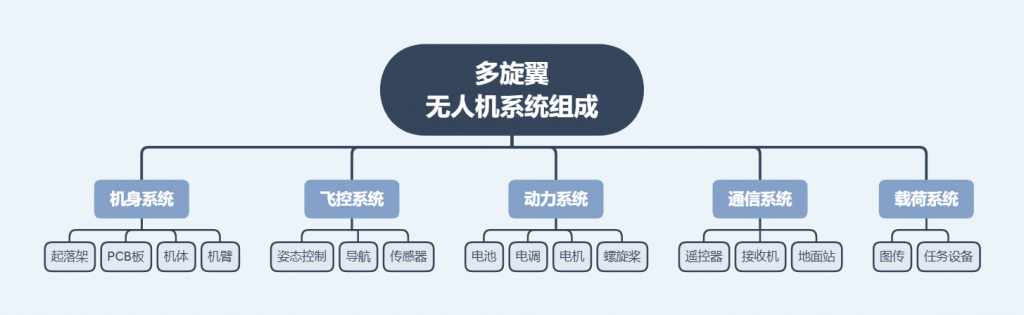
通常包括指挥调度、任务规划、操作控制、显示记录等功能。
地面站系统是无人机系统的一个重要组成部分,它通常包括以下功能:
飞行控制:地面站系统可以通过无线通信网络与无人机进行通信,实现对无人机的飞行控制,如起飞、降落、悬停、飞行路径规划等;
数据采集和传输:地面站系统可以通过搭载在无人机上的传感器,采集无人机飞行过程中的数据,如图像、视频、GPS 位置信息等,并将这些数据传输到地面站系统进行处理和分析;
任务规划:地面站系统可以根据任务需求,对无人机进行任务规划,如飞行路径规划、传感器配置、拍摄计划等;
监控和控制:地面站系统可以对无人机进行实时监控,包括无人机的飞行状态、传感器数据、电池电量等,同时可以对无人机进行远程控制,如调整飞行高度、速度、方向等;
数据处理和分析:地面站系统可以对采集到的数据进行处理和分析,如图像处理、目标识别、路径优化等,为任务执行提供决策支持;
安全管理:地面站系统可以对无人机进行安全管理,包括无人机的飞行许可、飞行限制、安全区域设置等,确保无人机的飞行安全;
用户界面:地面站系统通常提供用户界面,方便用户对无人机进行操作和管理,包括任务规划、飞行控制、数据采集和传输等。
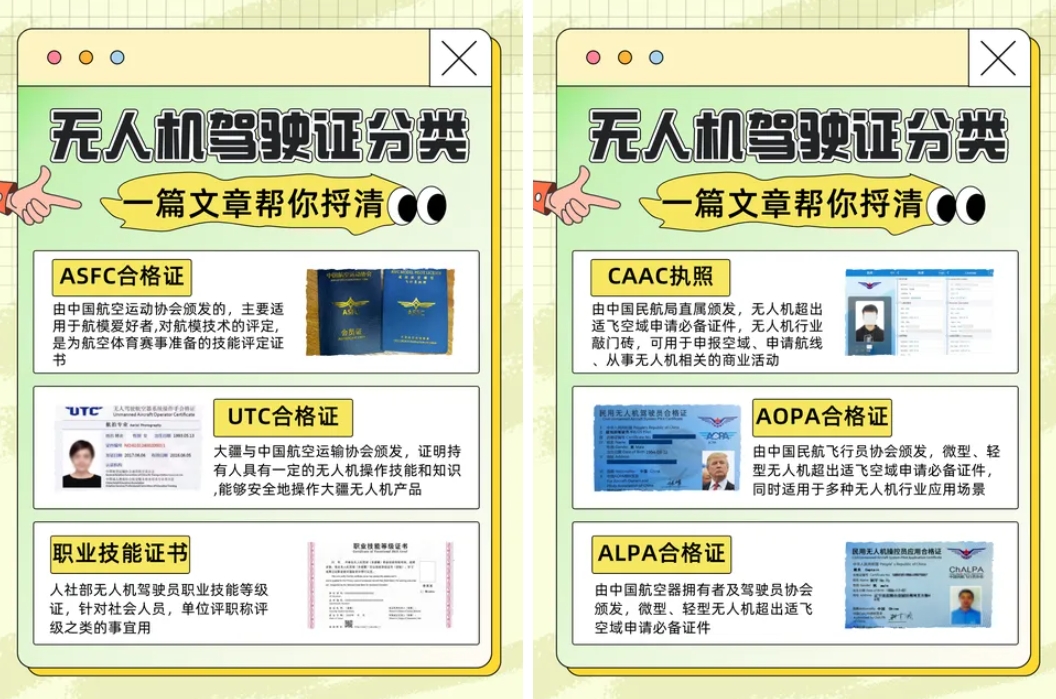
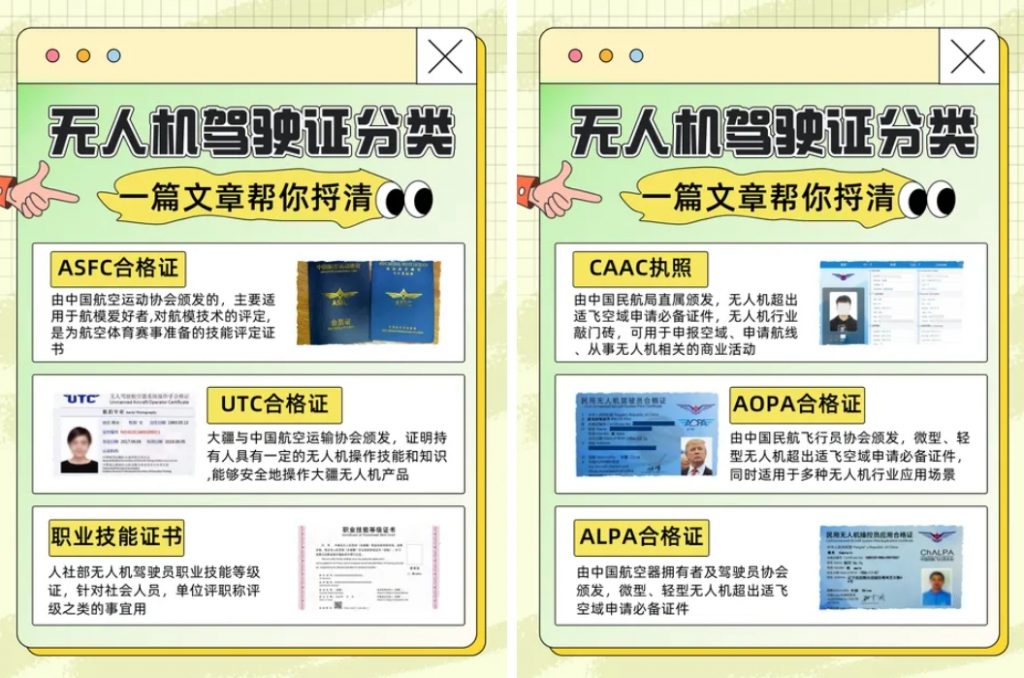
常见的无人机证件有7种,分别是CAAC、AOPA、ALPA、ASFC、UTC、1+x、职业技能证。其中CAAC无人机证件最有含金量,由中国民航局颁发。
 具体信息请看:https://uav.worldhtyg.club/387.html
具体信息请看:https://uav.worldhtyg.club/387.html
 具体信息请看:https://uav.worldhtyg.club/387.html
具体信息请看:https://uav.worldhtyg.club/387.html


优质内容超多精品,包罗万象

精选帖子超多精品,包罗万象