


 超级版主
超级版主地面控制站飞行参数综合显示的内容包括飞行与导航信息、数据链状态信息、设备状态信息、指令信息。
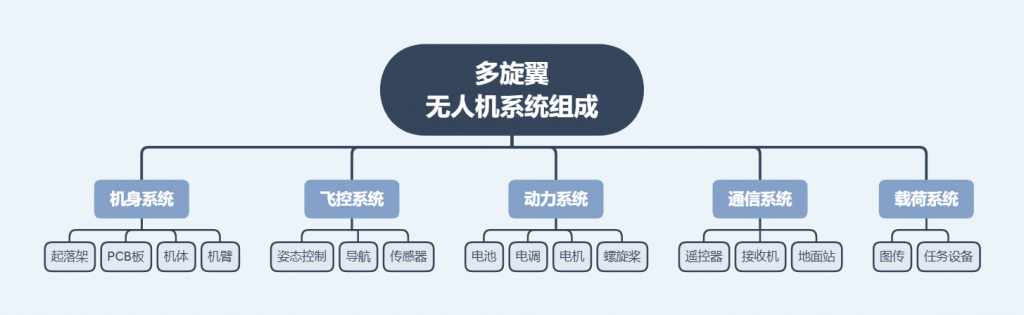
无人机系统(Unmanned Aerial Vehicle System,UAVS)是指由无人机、遥控器、地面控制站、数据链路和其他相关设备组成的系统。
无人机是无人机系统的核心部件,它通常是一种小型、轻便、低成本的飞行器,可以通过遥控器或自主飞行控制系统进行控制。遥控器是操作员用来控制无人机的设备,它通常通过无线电或红外线信号与无人机进行通信。地面控制站是无人机系统的控制中心,它通常由计算机、通信设备和显示设备组成,可以对无人机进行远程控制、监控和数据分析。数据链路是无人机系统的通信通道,它可以将无人机的飞行数据和图像传输到地面控制站或其他接收设备。
除了无人机和遥控器之外,无人机系统还包括其他相关设备,如传感器、摄像机、激光测距仪、GPS 导航仪等,这些设备可以为无人机提供各种数据和信息,从而实现各种应用。


优质内容超多精品,包罗万象