

 作者超级版主
作者超级版主无人机系统的下行链路的频段是2408-2400MHz
原因为:
一、使用频率:840.5-845MHz、1430-1444MHz和 2408-2440MHz。
二、840.5-845MHz可用于无人驾驶航空器系统的上行遥控链路。其中,841-845MHz也可采用时分方式用于无人驾驶航空器系统的上行遥控和下行遥测链路。
三、1430-1444MHz频段可用于无人驾驶航空器系统下行遥测与信息传输链路,其中,1430-1438MHz频段用于警用无人驾驶航空器和直升机视频传输,其他无人驾驶航空器使用1438-1444MHz频段。
四、2408-2440MHz频段可作为无人驾驶航空器系统上行遥控、下行遥测与信息传输链路的备份频段。相关无线电台站在该频段工作时不得对其他合法无线电业务造成影响,也不能寻求无线电干扰保护。

合成孔径雷达。
原因是合成孔径雷达(Synthetic Aperture Radar,简称 SAR)是一种利用微波信号进行遥感探测的雷达系统。它通过发射微波信号并接收反射回的信号,来获取目标的位置、形状、高度、速度等信息。
合成孔径雷达的工作原理是利用雷达天线在不同位置发射和接收信号,并将这些信号进行合成,以获得一个等效的大天线。这个等效天线的孔径大小取决于雷达天线的运动方式和速度,因此被称为合成孔径。
合成孔径雷达具有以下优点:
全天候:合成孔径雷达不受天气和光照条件的影响,可以在任何时间进行探测;
高分辨率:合成孔径雷达可以获得高分辨率的图像,可以识别小目标和细节;
远距离探测:合成孔径雷达可以在远距离探测目标,不受视线限制;
多极化:合成孔径雷达可以使用不同极化的信号进行探测,获得更多的目标信息。
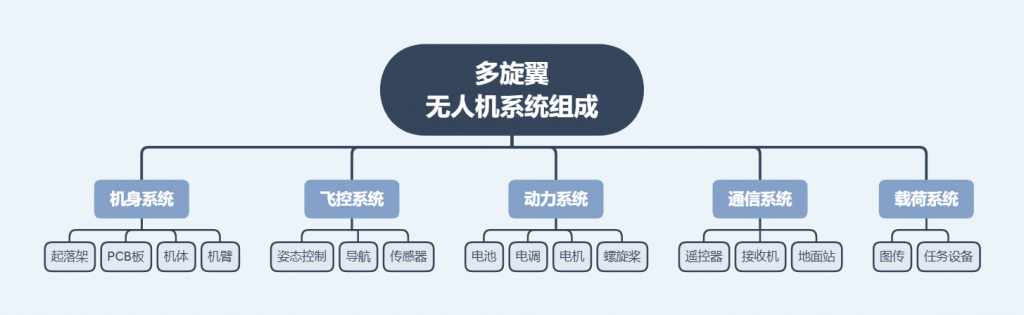
通常包括指挥调度、任务规划、操作控制、显示记录等功能。
地面站系统是无人机系统的一个重要组成部分,它通常包括以下功能:
飞行控制:地面站系统可以通过无线通信网络与无人机进行通信,实现对无人机的飞行控制,如起飞、降落、悬停、飞行路径规划等;
数据采集和传输:地面站系统可以通过搭载在无人机上的传感器,采集无人机飞行过程中的数据,如图像、视频、GPS 位置信息等,并将这些数据传输到地面站系统进行处理和分析;
任务规划:地面站系统可以根据任务需求,对无人机进行任务规划,如飞行路径规划、传感器配置、拍摄计划等;
监控和控制:地面站系统可以对无人机进行实时监控,包括无人机的飞行状态、传感器数据、电池电量等,同时可以对无人机进行远程控制,如调整飞行高度、速度、方向等;
数据处理和分析:地面站系统可以对采集到的数据进行处理和分析,如图像处理、目标识别、路径优化等,为任务执行提供决策支持;
安全管理:地面站系统可以对无人机进行安全管理,包括无人机的飞行许可、飞行限制、安全区域设置等,确保无人机的飞行安全;
用户界面:地面站系统通常提供用户界面,方便用户对无人机进行操作和管理,包括任务规划、飞行控制、数据采集和传输等。


优质内容超多精品,包罗万象