星球导航
航模
航模课堂
航模DIY
无人机
穿越机
DIY无人机
新手课堂
无人机综合
服务支持
赛事汇总
政策法规
飞行操控
设备评测
资源下载
Pix飞控教程
社区交流
发布
发布文章
发布帖子
开通会员
开通黄金会员
全站资源折扣购买
部分内容免费阅读
一对一技术指导
VIP用户专属QQ群
开通黄金会员
开通钻石会员
全站资源折扣购买
部分内容免费阅读
一对一技术指导
VIP用户专属QQ群
开通钻石会员
开通会员 尊享会员权益
登录
注册
找回密码
快速登录
QQ登录
微信登录
星球导航
航模
航模课堂
航模DIY
无人机
穿越机
DIY无人机
新手课堂
无人机综合
服务支持
赛事汇总
政策法规
飞行操控
设备评测
资源下载
Pix飞控教程
社区交流
开通会员 尊享会员权益
登录
注册
找回密码
快速登录
QQ登录
微信登录
优质内容
超多精品,包罗万象
更多
559人已阅读
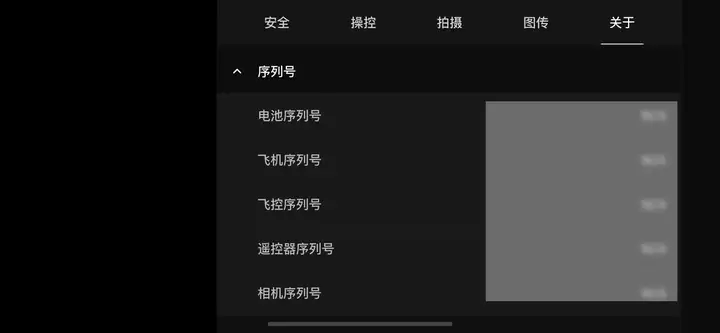
如何查看产品序列号(SN)、飞控序列号
TOP1
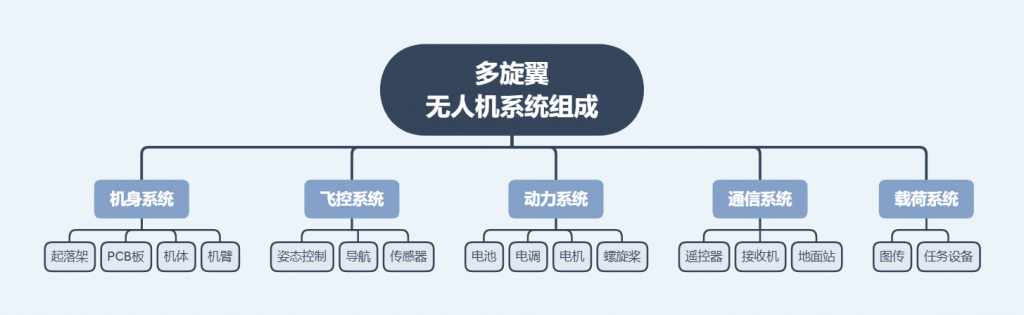
多旋翼无人机各部件介绍汇总
2年前
505人已阅读
TOP2
DJI Fly 航点飞行功能介绍
8个月前
362人已阅读
TOP3
无人机驾驶证分类
2年前
317人已阅读
TOP4
大疆航拍无人机桨叶材质、尺寸与型号汇总
8个月前
306人已阅读
TOP5
分享
社区交流
题库解析
帖子 24
互动 24
阅读 512
CAAC考证题库理论解析
超级版主
发布
全部
最新发布
最新回复
热门
精华
飞友工坊
2年前发布
9次阅读
关注
私信
尾桨主要作用是?
飞友工坊
作者
超级版主
0
尾桨主要作用是控制飞行器的航向和稳定性。尾桨通常安装在飞行器的尾部,由一个或多个桨叶组成。当尾桨旋转时,会产生一个反向的力矩,从而抵消飞行器前行时的力矩,使飞行器保持稳定的航向。
评分
1
分享
飞友工坊
2年前发布
8次阅读
关注
私信
为什么指令控制是飞行控制的方式之一?
飞友工坊
作者
超级版主
0
无人机指令控制是指通过发送指令来控制无人机的飞行。这些指令通常是通过无线电或其他通信技术发送的,并且可以指定无人机的飞行高度、速度、方向和其他操作参数。 无人机指令控制系统通常包括一个地面控制站和一个无人机上的接收器。地面控制站可以是一台计算机、平板电脑或智能手机,它可以发送指令并监控无人机的飞行状态。无人机上的接收器接收指令并执行相应的操作。 无人机指令控制系统通常使用多种技术,如 GPS、惯性导航系统、超声波传感器和摄像头等,来帮助无人机确定其位置、姿态和环境。这些技术可以帮助无人机在飞行过程中保持稳定和安全。
评分
1
分享
飞友工坊
2年前发布
8次阅读
关注
私信
固定翼无人机在姿态遥控状态下,如出现动力失效则正确的处理方法是?
飞友工坊
作者
超级版主
0
保持略大于平飞速度的速度建立下滑航线飞回本场或迫降无人区。 原因是无人机上飞控子系统是内回路,导航子系统是外回路。姿态遥控就是飞控内回路参与,导航外回路不参与,也称之姿态模式,或者说增稳模式,无人机驾驶员操作压力大大降低,我们把它称之为半自动。
评分
1
分享
飞友工坊
2年前发布
8次阅读
关注
私信
无人机气垫着陆的优点为什么是①不受无人机大小②不受无人机重量限制③回收效率高
飞友工坊
作者
超级版主
0
气垫着陆是一种用于无人机和其他航空器的着陆技术。它利用气体在地面上形成一层气垫,从而减少着陆时的冲击力,实现平稳着陆。 气垫着陆的基本原理是:在航空器着陆前,向地面喷出高压气体,使气体在地面上形成一层气垫。当航空器着陆时,气垫能够吸收着陆时的冲击力,从而减少航空器的震动和损坏。 相对于传统的着陆方式,气垫着陆具有以下优点: 1、减少着陆时的冲击力,实现平稳着陆,减少航空器的震动和损坏; 2、不受地形和天气的限制,能够在各种地形和天气条件下进行着陆; 3、对于传统的着陆方式,能够减少航空器的能耗,提高效率; 4、提高着陆的安全性和可靠性,减少着陆时的事故发生率。
评分
1
分享
飞友工坊
2年前发布
8次阅读
关注
私信
固定翼无人机配平主要考虑的是____沿纵轴的前后位置
飞友工坊
作者
超级版主
0
主要考虑的是重心沿纵轴的前后位置。 固定翼无人机的配平是指通过调整飞机的重量分布和气动外形,以使飞机在飞行时保持平衡和稳定。 气动焦点是指在航空、航天等领域中,飞机、导弹等飞行器在飞行过程中,由于空气动力学的作用,其气动中心(或称焦点)会发生移动的现象。气动焦点的移动会对飞行器的稳定性、操纵性等性能产生影响,因此需要进行精确的计算和控制。
评分
1
分享
飞友工坊
2年前发布
8次阅读
关注
私信
为什么经/纬度不属于无人机飞控子系统所需要信息?
飞友工坊
作者
超级版主
0
经纬度是导航子系统需要的数据信息,飞控子系统控制无人机的姿态飞行,就需要空速信息和姿态角信息。 在航空航天领域,姿态角是指物体相对于参考坐标系的三维角度。 具体来说,姿态角包括: 俯仰角(Pitch Angle):物体在垂直平面内相对于参考坐标系的角度,通常以向上为正; 滚转角(RollAngle):物体在水平平面内相对于参考坐标系的角度,通常以向右为正; 偏航角(YawAngle):物体在水平面内相对于参考坐标系的角度,通常以向前为正。
评分
1
分享
上一页
1
2
3
4
下一页
HI!请登录
登录
注册
社交账号登录
QQ登录
微信登录
优质内容
超多精品,包罗万象
更多
559人已阅读
如何查看产品序列号(SN)、飞控序列号
TOP1
多旋翼无人机各部件介绍汇总
2年前
505人已阅读
TOP2
DJI Fly 航点飞行功能介绍
8个月前
362人已阅读
TOP3
登录
没有账号?立即注册
邮箱
验证码
发送验证码
记住登录
账号密码登录
登录
用户名或邮箱
登录密码
记住登录
找回密码
|
免密登录
登录
社交账号登录
QQ登录
微信登录
注册
已有账号,立即登录
设置用户名
设置密码
重复密码
注册
扫码登录
使用
其它方式登录
或
注册
扫码登录


 作者超级版主
作者超级版主

 作者超级版主
作者超级版主